Inner Orientation
Camera Constant (Focal Length)
The camera constant is the distance between the focal point of a lens and the image sensor:
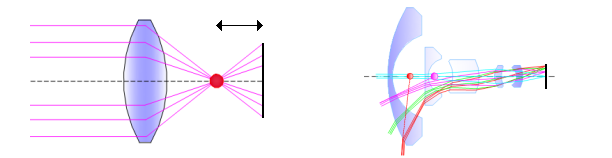
All light rays converge at the focal point. Many types of lenses have two camera constants because the light rays converge on a line; the camera constants are then the front and rear points of this line.
Image Coordinate System
The ELCOVISION 10 image coordinate system is a right-handed Cartesian coordinate system and is defined by the dimensions of the image sensor or the Réseau grid plate or by frame marks in the camera. The unit is mm. The measurements in the image are converted to this system (image coordinates) and thus standardised, making image measurements comparable across different camera models.
The 0,0 point of the image coordinate system is exactly in the centre of the image:

Pixel Coordinate System
The pixel coordinate system is a left-handed Cartesian coordinate system and is defined by the pixel dimensions of the image. The unit is pixels.
The 0,0 point of the image coordinate system is the top left corner of the top left pixel:

Principal Point Xh, Yh
The principal point (xH, yH) are the coordinates of the image principal point in mm. With high-quality camera/lens combinations, the principal point position is usually very close to the zero point of the image coordinate system, usually within 0.1 mm or less. With cheap cameras, the image principal point can be quite far from the image centre.
ELCOVISION 10 Camera Modells
Simple Pinhole Camera with Simple Radial Distortion
A simple camera model with 1 parameter for radial distortion. Only suitable for lenses with very slight distortion.
| Camera Constant | 1 Parameter: c |
| Principal Point | 2 Parameter: Xh, Yh |
| Radial Distortion | 1 Parameter: R1 |
Simple Fisheye Camera Model
A very simple camera model without distortion parameters. Only suitable for ‘optimal’ fisheye lenses without additional distortion.
| Camera Constant | 1 Parameter: c |
| Principal Point | 2 Parameter: Xh, Yh |
| Radial Distortion | 1 Parameter: R1 |
Pinhole Camera with Radial Distortion
A camera model with parameters for radial distortion. Suitable for slightly distorting lenses; results in good accuracy. Not suitable for fisheye lenses.
| Camera Constant | 1 Parameter: c |
| Principal Point | 2 Parameter: Xh, Yh |
| Radial Distortion | 2 Parameter: R1, R2 |
Fish-eye Camera Model
A simple camera model for fish-eye lenses
| Camera Constant | 1 Parameter: c |
| Principal Point | 2 Parameter: Xh, Yh |
| Radial Distortion | 2 Parameter: R1, R2 |
Pinhole Camera with Radial and Tangential Distortion
A camera model with parameters for radial and tangential distortion. Suitable for normal lenses as well as those with stronger distortion, resulting in very good accuracy. Not suitable for fisheye lenses.
| Camera Constant | 2 Parameter: c, c1 |
| Principal Point | 2 Parameter: Xh, Yh |
| Radial Distortion | 2 Parameter: R1, R2 |
| Tangential Distortion | 2 Parameter: T1, T2 |
Pinhole Camera / Fisheye Camera Model with Radial and Tangential Distortion
A camera model for almost all types of lenses. Produces good results. Requires at least 15 image measurements per calibrated image for good results.
| Camera Constant | 2 Parameter: c, c1 |
| Principal Point | 2 Parameter: Xh, Yh |
| Radial Distortion | 6 Parameter: R1 - R6 |
| Tangential Distortion | 2 Parameter: T1, T2 |
Fish-eye Cameras Model for flat Fisheye Lenses
A camera model with additional parameters to compensate for the distortions of flat fisheye lenses.
| Camera Constant | 2 Parameter: c, c1 |
| Principal Point | 2 Parameter: Xh, Yh |
| Radial Distortion | 6 Parameter: R1 - R6 |
| Tangential Distortion | 2 Parameter: T1, T2 |
Leica BLK Camera Model
A camera model for Leica BLK instruments. Also well suited for other highly distorted lenses.
| Camera Constant | 2 Parameter: c, c1 |
| Principal Point | 2 Parameter: Xh, Yh |
| Radial Distortion | 3 Parameter: R1, R2, R3 |
| Tangential Distortion | 2 Parameter: T1, T2 |